





关键词 |
,水下淤泥清理机器人 |
面向地区 |
机器人维护与保养
清淤工作结束后,要对机器人进行全面的清洗。清除机器人表面和内部的淤泥残留,特别是吸泥管道、挖掘装置等容易堵塞的部件。可以采用高压水枪冲洗等方式进行清洗。
清淤方式的选择与控制
根据淤泥的情况合理选择清淤方式。如果淤泥比较松软,可直接采用吸泥方式,通过机器人的大功率吸泥泵将淤泥吸入储存罐。在吸泥过程中,要控制吸泥口的位置和角度,确保能够大程度地吸取淤泥。例如,将吸泥口贴近淤泥堆积较多的底部和角落。
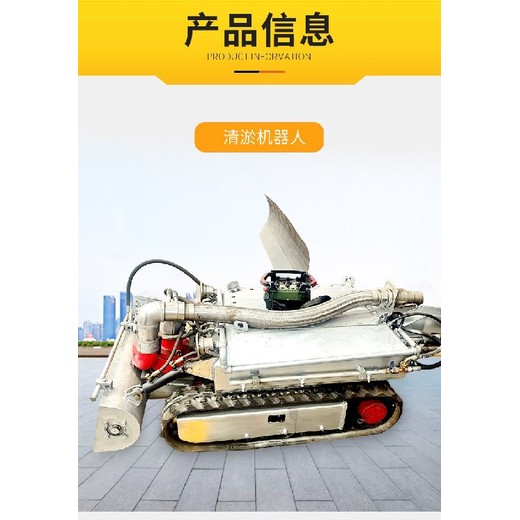
清淤机器人通常由水下推进器、控制系统、机械臂、吸泥装置和传感器等部分组成。其工作原理主要基于自动化控制和机器人技术,通过预设程序或远程控制,使机器人完成一系列水下作业任务。具体而言,清淤机器人依靠推进器在水中移动,并使用传感器探测淤泥的位置和厚度。然后,通过机械臂或吸泥装置将淤泥清除,并运送到位置。
港口与航道工程领域2:可在码头泊位下方、港池等区域清淤,避免淤泥影响船舶停靠和航行安全;还能在航道不同水深区域工作,提高航道利用率,保障海上运输安全和。
环境评估
对涵箱和桥洞的具体环境进行详细测量和分析。包括涵箱、桥洞的尺寸(长度、宽度、高度)、形状(圆形、方形、拱形等)、内部结构(是否有支撑柱、分隔墙等)。例如,对于拱形桥洞,要注意弧度对机器人行动的影响。
了解淤泥的性质,如淤泥的厚度、密度、粘度,以及是否含有杂物(如石块、树枝等)。如果淤泥中含有大量大块杂物,可能需要先对其进行预处理,或者选择具有更强杂物处理能力的清淤机器人。
评估水流情况,包括水流速度、流向和潮汐变化(如果在河口附近的桥洞等)。水流过强可能会影响机器人的稳定性和操作精度,需要根据实际水流情况选择合适的机器人固定方式或配重。

设备调试与检查
在正式清淤之前,要对清淤机器人进行全面调试。检查机器人的各个关节、机械臂的灵活性,确保其能够正常伸展和收缩。例如,清淤机器人的吸泥管需要能够在一定角度范围内自由转动,以适应不同位置的淤泥吸取。



















